Ball Tree
Ball Tree 是一种用于加速向量检索的空间划分树结构,特别适用于中低维稠密向量,在某些情况下比 KD-Tree 更稳定。
📌 原理简介
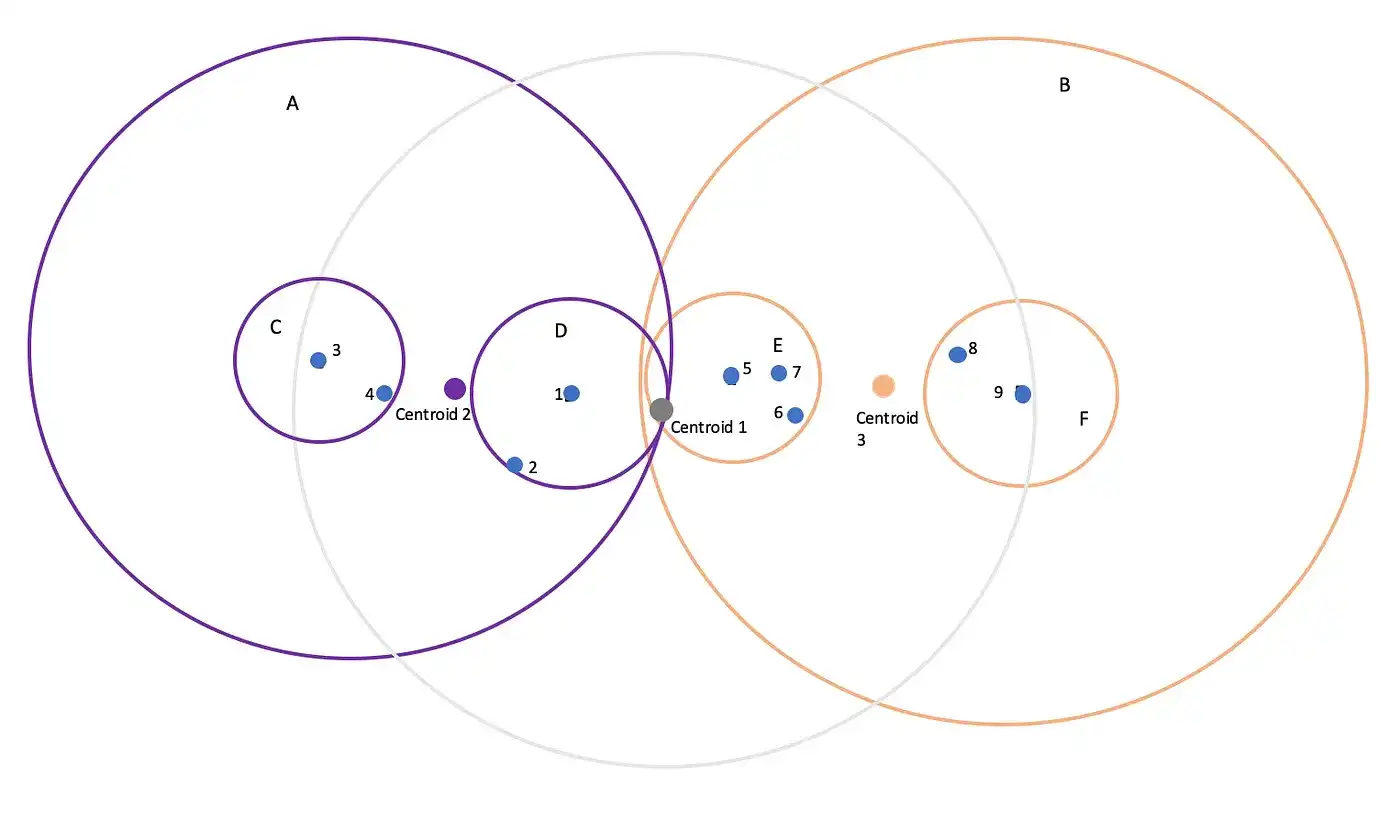
Ball Tree 与 KD-Tree 类似,都是通过树结构加速最近邻查询。但它不是按维度划分空间,而是将数据划分为包围球(ball):
- 每个节点表示一个“球形区域”,包含其所有子节点;
- 每次划分时,将数据划为两个簇,每个簇建立一个球(中心 + 半径);
- 递归构建子节点,直到达到叶子条件(如点数少于阈值)。
Tip
Ball Tree 是基于度量空间的方法,只要定义了距离函数(如 L2、曼哈顿距离等),就可以构建,不依赖向量的坐标系。
✏️ 查询过程
查询时,通过与球的距离关系进行“剪枝”,避免不必要的遍历:
- 若当前球与查询向量的最小可能距离大于已知最近点的距离,则该球下所有点都可跳过;
- 否则递归查找子球,直到到达叶节点。
✅ 优点
- 不依赖坐标轴顺序,适用于任意维度(比 KD-Tree 更鲁棒);
- 更适合欧氏距离下的球形分布数据;
- 支持任意距离函数(只要满足三角不等式);
- 在中维(20~100维)场景中性能优于 KD-Tree。
⚠️ 局限性
- 在高维空间依然存在维度灾难;
- 构建时间通常比 KD-Tree 慢;
- 性能受数据分布影响较大(球重叠过多会影响剪枝效果)。
🧪 示例(scikit-learn)
from sklearn.neighbors import BallTree
import numpy as np
# 构造数据
data = np.random.random((1000, 10)) # 1000 个 10 维向量
tree = BallTree(data, leaf_size=40, metric='euclidean')
# 查询最近邻
query = np.random.random((1, 10))
dist, ind = tree.query(query, k=3)
print("最近邻索引:", ind)
print("距离:", dist)
🆚 KD-Tree vs Ball Tree
KD-Tree 和 Ball Tree 都是用于加速最近邻搜索的空间划分数据结构,适用于中小规模、低至中维度的向量检索。它们的主要区别如下:
| 特性 | KD-Tree | Ball Tree |
|---|---|---|
| 划分方式 | 按坐标轴切分(超平面) | 使用球体划分(中心 + 半径) |
| 维度适应性 | 低维效果佳(通常 < 20) | 中维更稳定(20–100维) |
| 支持的距离类型 | 限于欧氏距离、需坐标空间 | 支持任意度量(欧氏、曼哈顿等) |
| 构建速度 | 较快 | 稍慢,需聚类估算 |
| 查询剪枝能力 | 高维下易退化 | 更鲁棒,剪枝效果较好 |
| 实现复杂度 | 较简单 | 稍复杂(涉及簇划分与球估计) |
Tip
实际选择时,可参考以下建议:
- 数据维度较低(< 20)且对速度要求较高 → 推荐使用 KD-Tree
- 数据维度适中(20–100)或使用非欧几里得距离 → 推荐使用 Ball Tree